Mobile Robotics
Mobile robotics is a field that includes many engineering and science disciplines, from mechanical, electrical, and electronics engineering to computer, cognitive, and social sciences.
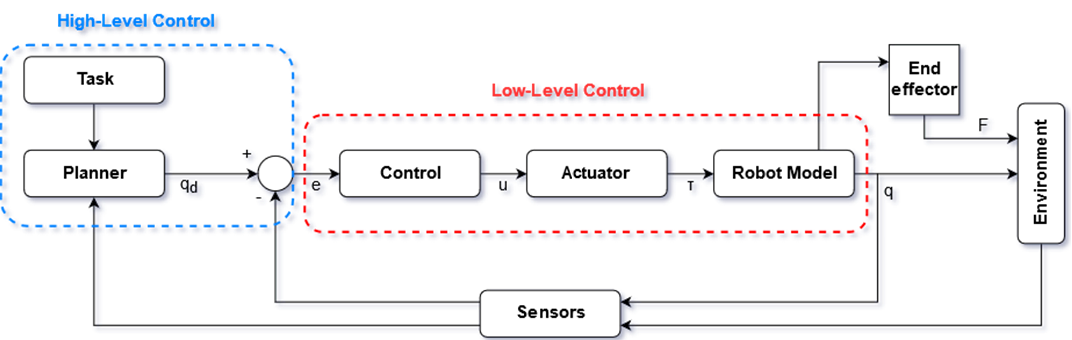
As far as control is concerned, in order to be autonomous, a mobile robot must be able to answer some fundamental questions: Where am I? Where have I been? How can I get to my destination? These questions are part of the high-level control logic and are closely related to the perception of the environment.
The low level, on the other hand, takes into account the kinematics and dynamics of the vehicle in order to optimally control the trajectories of the actuators.
Our research focuses on control algorithms, trajectory planning, environment mapping, perception of space and autonomous navigation.
Thesis
- Vito Andrea Racanelli, "Autonomous Mobile Robots: Space Perception and Navigation", rel. Prof. Saverio Mascolo
- Balducci Giuseppe, "Guida autonoma con sensori ad ultrasuoni", rel. Prof. Saverio Mascolo, co-rel. BSc. Vito Andrea Racanelli
- Immacolata Rossini, "Prototipo di un robot a guida differenziale", rel. Prof. Saverio Mascolo, co-rel. BSc. Vito Andrea Racanelli
- Giovanni De Lucia "Tecniche di filtraggio di dati provenienti da inertial measurement Unit (I.M.U.)", rel. Prof. Saverio Mascolo, co-rel. BSc. Vito Andrea Racanelli
- Michele Damone, "Inseguimento automatico di un landmark QR da parte di un robot mobile", rel. Prof. Saverio Mascolo, co-rel. BSc. Vito Andrea Racanelli
- Mariangela Stragapede, "Robot operating system (ROS) per applicazioni di robotica mobile", rel. Dr. Luca De Cicco, co-rel. BSc. Vito Andrea Racanelli
- Giovanni Travaglio, "Progettazione e implementazione di un sistema embedded per il controllo di un veicolo elettrico su rete can-bus", rel.Saverio Mascolo ; co-rel. Dr. Luca De Cicco
- Cosimo Matteo Laterza, "Autonomous Parking", rel. Prof. Saverio Mascolo, co-rel. BSc. Vito Andrea Racanelli
- Maurizio Di Matteo, "Indoor localization systems based on the WI-FI technology", rel. Prof. Saverio Mascolo, co-rel. Dr. Luca De Cicco
- Dario Sparapano, "PID per il controllo di droni", rel. Prof. Saverio Mascolo, co-rel. Dr. Luca De Cicco
- Mattia Briga, "Autonomous parking of a mobile robot", rel. Prof. Saverio Mascolo, co-rel. Dr. Luca De Cicco, BSc. Vito Andrea Racanelli
- Cosimo Damiano Lanotte, "Studio di tecniche per la localizzazione indoor per applicazioni di robotica mobile", rel. Prof. Saverio Mascolo, co-rel. Dr. Luca De Cicco
- Andrea Boccuni, "Studio del controllo di assetto di un quadricottero multirotore", rel. Dr. Luca De Cicco
- Danilo Scarini, "Control of a 4WS4WD robot using ROS", rel. Dr. Luca De Cicco
- Carlo Croce, "A Distributed Embedded Control Framework for Modular Robots based on ROS", rel. Prof. Saverio Mascolo, co-rel. Dr. Luca De Cicco
- Ugo Marco Ferrulli, "Line maze solver for Autonomous Driving Systems", rel. Prof. Saverio Mascolo, co-rel. BSc. Vito Andrea Racanelli
- Fabio Cuciniello, "Studio di un sistema lane detection and following per guida autonoma", rel. Prof. Saverio Mascolo, co-rel. BSc. Vito Andrea Racanelli
- Antonio Mancuso, "Parcheggio Autonomo di Robot Mobili", rel. Prof. Saverio Mascolo, co-rel. BSc. Vito Andrea Racanelli


